Research Blog: Making sense of “Sensors”

Types of Sensors in Robots and UAS
“The basic function of a sensor is to measure some feature of the world, such as light, sound, or pressure and convert that measurement into an electrical signal, usually a voltage or a current,” (Arora et al., 2017). The classification of sensors can be broken down into two basic categories known as Exteroceptive and Proprioceptive sensors.
- Ultrasonics - emits a pulse then receives it and measures the timing between in order to extrapolate a distance
- LiDAR- Light detection and ranging
- Radar - Radio frequency
- Electro - Optical for Intelligence Surveillance and Reconnaissance
Exteroceptor sensors measure the positional or force-type interaction of the robot with its external environment. Proprioceptor measures kinematic and dynamic parameters of a robot’s internal system. “The basic type of sensors can be broken down into: Light, Heat, Touch, Ultra-sonic rangers, Gyroscopes,” (Arora et al., 2017). In summary, sensors work by the detection of inputs like energy that can be measured and converted into quantitative data. The system, or the Command and Control element (C2), can interpret the data and act accordingly.
- Inclinometer - measures tilt or angle of the x axis
- Compass - Directional instrument used to detect direction and motion
- GNSS GPS - Global Navigation Satellite System, Global Positioning System
- INS - Inertial Navigation Systems
- Shaft encoder - transducer converses the angular position of a shaft or axel to an analog or digital code
- Electro-Optical for Localization
Remote Sensing and electromagnetic radiation
Our readings also address how sensors actually work. In my opinion, some of the most interesting sensors use electromagnetic radiation to gather critical information. Sensors do this by passive or active means. “Passive remote sensing systems measure reflected solar radiation in visible, near infrared, and mid-infrared wavelengths, or absorbed and then reemitted solar radiation in thermal infrared wavelengths. Active remote sensing systems, on the other hand, emit radiation toward the target using their own energy source and detect the radiation reflected from that target,” (Dong, Pinliang, & Qi Chen, 2017).

Figure 1. Electromagnetic spectrum showing visible light band (Crop Copter, 2018).
Why would a UAV need a sensor to look for Quartz and how can it help my 401K
In Brief Overview of Remote Sensing, research was conducted in the 80s over Thermal Infrared Multispectral Scanner (TIMS) for remote sensing nonrenewable resources and that TIMS can identify or map quartz-bearing rock, (Dong, Pinliang, & Qi Chen, 2017). What is most intriguing is that they fail to further discuss the significance of quartz-bearing rock. So let me inform you of what they are really after. Identifying quartz-bearing rock and understanding the age and composition means finding gold! Steven Wamback, a natural resource scientist explains the significance of quartz. Wamback (2018) states the following:
In its original form, gold appears in igneous volcanic hydrothermal (hot water) veins where it is deposited along with quartz, amethyst, other minerals and heavy metal ores. The “Mother Lode” of gold in California is a region crisscrossed by many such quartz-and-gold-filled hydrothermal veins. Nearly all hydrothermal quartz veins everywhere contain some amount of gold. To find the gold, first find the quartz. (Wamback, 2018).

Figure 2. Gold Bearing Quartz (Gold Rush Nuggets, 2018).
Research Analysis

Figure 3. UAS inspecting Powerline (UAS Vision, 2018).
Looking at this week’s assignment, I focused on a piece of research conducted using a unmanned helicopter integrated with multiple sensors for the purpose of conducting power line inspection. As a former pipeline inspector, I found this particular research interesting because of the experiences that I had in conducting inspections in the remote and sometimes inhospitable areas on large ranches in South West Texas.
As a former third party inspector, my job was to follow the pipelines in the process of construction. My primary tasks was to calculate and mark surface damage along the Right Of Way (ROW), produce weld maps and coordinates, watch the welding processes, track and identify Non Destructive weld testing documents and procedures, walk all areas made by the trenching machines to make sure they were properly prepared and reinforced for laying the pipeline in the ground. On one dark morning I remember looking at freshly cut ditches, made the previous day, and noticed what I thought was little kitty cat tracks in the reddish brown dirt. Then it dawned on me as I found an accompanying track that was as large as my clenched fist, this was the mama of those little kitty cats that made those tracks.
The next morning my concerns had been validated. As I drove the hour long trip through one of the largest privately held ranches in Texas to the pipeline sight, I saw a grey mountain lion traverse the road not far from the location where I had walked the previous day. The road was unimproved but large enough for two medium sized Ford F-150 trucks to pass each other with ample space between them. From the tip of the cat’s tail to tip of its jet black nose the cat spanned three quarters of the road. I think it was that precise moment that two critical thinking points converged in my brain housing group and that was: one, I did not bring a change of underwear and two, that there should be a better way to conduct pipeline inspections without having to walk this dangerous swath of 24 mile pipeline without getting eaten by an extremely large predator. Hence, this interest in unmanned systems for conducting inspections.

Figure 4. Dangerous Wildlife (WestsideToday, 2016).
Inspections are a critical job in any type of manufacturing or utility service. It provides a way to make sure customers receive a quality and reliable product or service. Flying a unmanned helicopter (UAS) is one way of conducting an inspection such as electrical utility lines that traverse large areas using a various assortment of sensing systems. The authors of my research article had to address several key issues to ensure the feasibility of the system. First they had to figure out the location of the UAS (Localization). Second, the system needed to determine a way to follow the target that needed to be inspected, otherwise known as tracking (electric powerline and structural components). Third, the system needed various sensors to provide different types of data to help define, extrapolate, and differentiate the data to help make sure what they were intended to observe in order to identify anomalous situations. Lastly, the system needed to change position and elevation so It would not veer off path or fly into the side of a mountain, (Liu, Xie, Xu, & Zhang, 2017).
To address this issue, the researchers constructed a pod that would contain multiple sensors that would turn on at different stages of the mission and gather data simultaneously to increase efficiency and address any gaps in a single sensor. Researchers found the following:
“The sensor pod is the unit where all the sensors are placed, which integrates six sensors in total including the position and orientation system (POS), light detection and ranging (LIDAR), thermal camera, ultraviolet camera, a long-focus camera and short-focus camera as shown in Figure 1b. Among all the sensors, the lines-of-sight of the infrared camera and the ultraviolet camera, the long-focus camera and the short-fous camera are parallel to each other,” (Liu, Xie, Xu, & Zhang, 2017).

Figure 5. (a) sensor pod attached to helicopter (b) multiple sensor configured in pod (Liu, Xie, Xu, & Zhang, 2017).
One particular sensor that I focused my attention on was the thermal infrared imaging camera. The purpose of using the imaging is to detect the heat so that the UAS can follow a reliable signature throughout the mission. I find this interesting because of the potential problem of the UAS to follow an intersecting powerline due to intersecting heat signatures at powerline crossings. The researches addressed this issue by calculating proper alignment safe flying considerations, distance for fuel considerations, and mapping of the powerline structures before the mission (path planning), (Liu, Xie, Xu, & Zhang, 2017).
Here is the basic breakdown of the pod sensors and responsibilities:
- LiDAR used on monitoring the distance between the electric transmission lines and the surrounding vegetation
- Thermal infrared used to monitor heat status of facilities including electric poer fittings, power lines and insulators
- Ultraviolet videos acquired by the UV camera can be used on monitoring abnormal discharges of electric power fittings, power lines and insulators
- Short focus cameras can b used on inspecting weather, broken conductors, and tilted towers
- Long focus cameras can be used on diagnosing the anomalies including missing pins, busted insulators and electric power fittings.
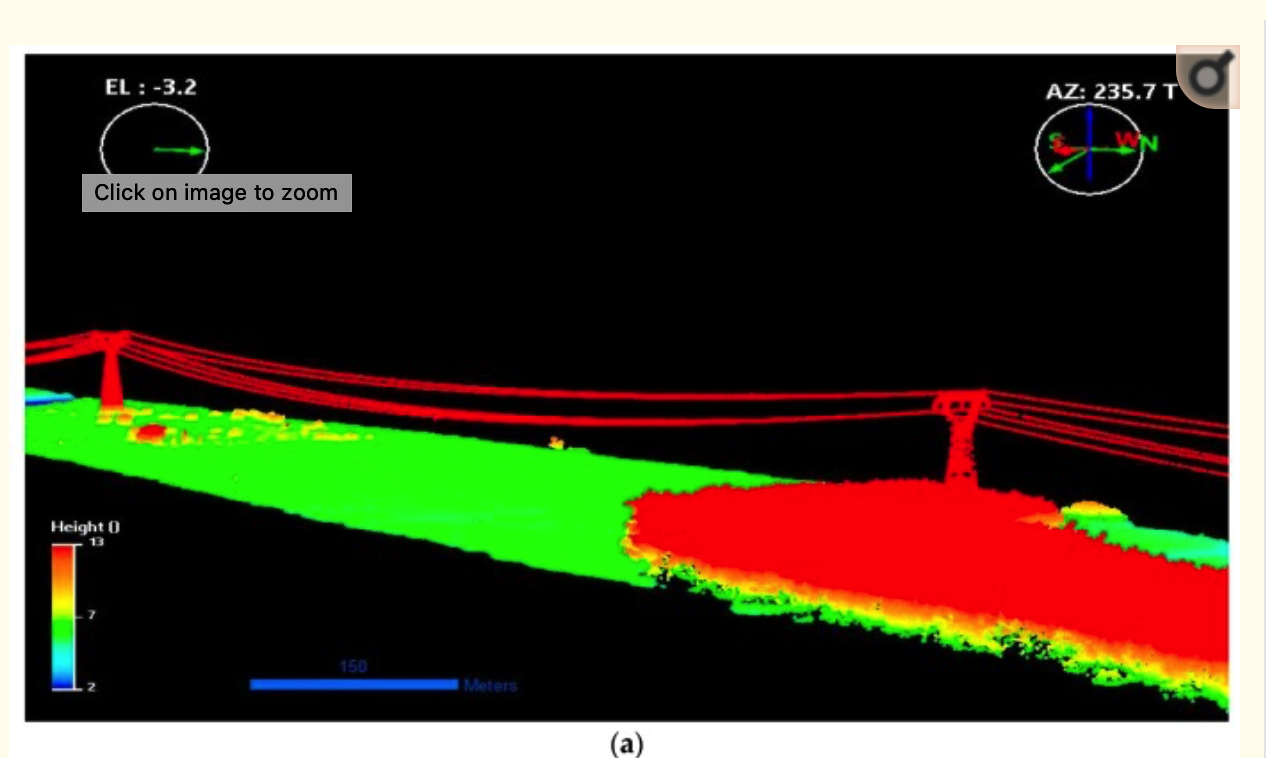
Figure 6. Heat signature radiating off the power lines used for tracking (Liu, Xie, Xu, & Zhang, 2017).

Figure 7. Structural anomalies (a) shows a broken insulator (b) torsional dampers broken away from the tower (Liu, Xie, Xu, & Zhang, 2017).
In conclusion, the test runs proved that flying a UAS helicopter with multiple sensors can be an effective way to conduct powerline inspections over long distances. I could discuss the other sensor types and functions and mathematical representations but it is Thanksgiving, dishes are piling up and laundry needs to be done! Happy Holidays!
References
Arora, S. K., Gupta, A.K., & Westcott, J.R. (2017). Industrial Automation and Robotics. Dulles, Virginia: Laxmi Publications Pvt. Ltd.
Bruggemann, T., Lai, J., & Mejias, L. (2014). Sensors for Missions. In Kimon P. Valavanis, & George J. Vachtsevanos (Eds.) Handbook of Unmanned Aerial Vehicles. Springer, Dordrecht, Netherlands, pp. 385-399.
Camargo Jr., J. B., Cugnasca, P. S., Sesso, D. B., Vieira da Silva Neto, A., & Vismari L. F. (2016, December). An Approach to Assess the Safety of ADS-B-baed Unmanned Aerial Systems: Data Integrity as a Safety Issues. Journal of Intelligent & Robotic Systems, 84(1-4), pp 621-638.
Campbell, J. B., & Wynne, R. H. (2011). Introduction to Remote Sensing. Fifth Edition. Retrieved from https://ebookcentral-proquest-com.ezproxy.libproxy.db.
erau.edu/lib/erau/detail.action?docID=843851#\
Crop Copter (2018). Electromagnetic spectrum showing visible light band [Digital Image]. Retrieved from http://www.cropcopter.co/remote-sensing-101/
Crop Copter. (2018). Remote Sensing 101. Retrieved from http://www.cropcopter.co/
remote-sensing-101/
Dong, Pinliang, & Qi Chen. (2017). LiDAR Remote Sensing and Applications. Retrieved from http://ebookcentral.proquest.com/lib/erau/detail.action?docID=5185347
Gold Rush Nuggets. (2018). Gold Bearing Quartz [Digital Image]. Retrieved from https://www.goldrushnuggets.com/goldinquartz.html
Leonics Co., Ltd. (2013). Understanding Electricity. Retrieved from
http://www.leonics.com/support/article2_2j/articles2_2j_en.php
Liu, Z., Xie, X., Xu, C., & Zhang, Y. (2017, May 26). A Multiple Sensors Platform Method for Power Line Inspection Based on a Large Unmanned Helicopter. Sensors (Basel), 17(6). Retrieved from https://www.ncbi.nlm.nih.gov/pmc/articles
/PMC5492564/
UAS Vision. (2018). UAS inspecting Powerline [Digital Image]. Retrieved from https://www.uasvision.com/wp-content/uploads/2013/09/CAMCOPTER-S-100_FLIR_Transpower_01.jpg
Wamback, S. J. (2018, March 13). How to Find Gold in Quartz. Retrieved from https://sciencing.com/gold-quartz-6519106.html
WestSide Today. (2016, July 7). Dangerous Wildlife [Digital Image]. Retrieved from https://westsidetoday.com/2016/07/07/120941/
Comments
Post a Comment